1. 简介 #
由于 ArceOS 本身就有完整的任务和调度设计,如何将其和 seL4 的任务及调度系统融合,是移植过程中必须解决的问题。主要设计要点如下
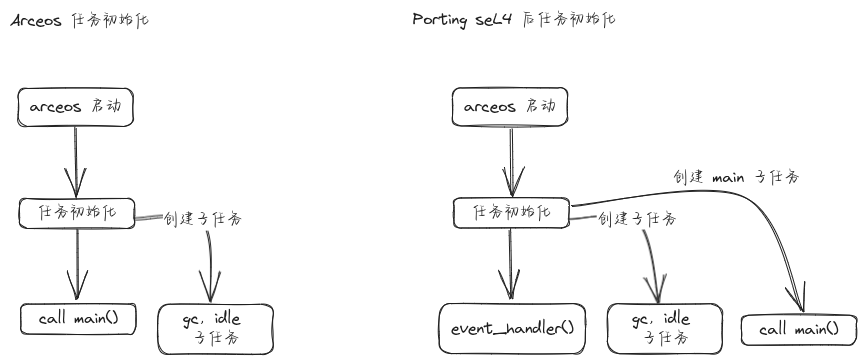
在启动时,每个核心上会额外启动一个 seL4 任务,作为管理任务,负责创建,调度,迁移子任务。该核心上其他任务都是它的子任务。
每个 ArceOS 任务就是一个独立的 seL4 任务,只不过共享同一个 vspace,类似线程。
调度器使用 ArceOS 调度器,但是调度操作通过 seL4 的 TCB 操作实现。基本就是 suspend 上一个任务,resume 下一个任务。
创建,调度,迁移任务都是由子任务发送 IPC 请求给管理任务,由管理任务执行具体操作。
子任务的 cspace 作为一个 cnode 包含在管理任务中,因此管理任务可以访问子任务的能力。
2. 背景知识 #
在不打开 MCS 时,seL4 调度基本是一个带优先级的 RR 调度器,同时可以手动 suspend 和 resume 任务,同时可以迁移任务到不同的 CPU 核心。因此基本可以将 seL4 的调度器当作透明的存在,可以使用 arceos 调度机制。
进行调度时,需要操作该任务的 TCB 能力,因此必须要有一个管理任务,该任务拥有所有子任务的 TCB 能力,可以进行调度操作。
3. 实现 #
3.1 任务组成元素 #
首先看一下每个 seL4 子任务的结构体设计
/// Basic unit representing a task in seL4.
pub struct NormalTask {
// 该任务所有能力的集合,放在一起是为了方便管理
pub capset: CapSet,
// 分配给该任务的 untyped 能力,所有能力都是从其中分配出来的 (共享的内存能力除外)
// 基本上每个任务需要能力是固定的,所以 untyped 能力大小是固定的
pub untyped: cap::Untyped,
// 分配给该任务的 ipc buffer 区域
pub ipc_buffer_addr: VirtAddr,
// 任务的唯一标识符
pub tid: usize,
// 任务的 CPU 亲和性,迁移时会用到
pub affinity: usize,
// 任务在管理任务 cspace 中的 cnode 索引,管理任务通过该索引找到该任务的能力
pub cnode_index: usize,
// 任务是否刚刚被迁移了,需要在下一次调度时设置亲和性
pub migrate: bool,
// 任务创建时所在的 CPU 核心,主要是为了回收 untyped 能力时使用,必须把 untyped 回收到创建它的核心上
pub created_cpu: usize,
}
3.2 任务服务 #
所有任务操作都由管理任务执行,其提供以下任务服务
/// 定义服务事件枚举
#[derive(Debug, IntoPrimitive, TryFromPrimitive)]
#[repr(u64)]
pub enum ServiceEvent {
/// 创建任务
CreateTask = 0x1000,
/// 切换任务
SwitchTask,
/// 退出任务
ExitTask,
/// 退出系统
ExitSystem,
/// 迁移任务
MigrateTask,
}
3.3 任务创建 #
任务创建是一个固定的过程,对于子任务来说,创建时已经申请了其所有需要的能力,运行时不需要再申请其他能力。
任务创建主要流程如代码所示
// 分配一块 untyped 区域,固定大小为 256KB
let untyped = alloc_untyped(cpu_id);
// 分配一个空闲的 cnode index 给该任务
let cnode_index = TASK_CSPACE_ALLOCATOR
.lock()
.alloc()
.expect("no more cnode index");
// 创建一个 capset,其中会创建子任务的 root_cnode 并且 move 到父任务的 cspace 中
let mut capset = CapSet::new(cnode_index, CNODE_RADIX_BITS, untyped, 0x100).unwrap();
// 创建 TCB 能力,通过 capset 创建,受 capset 管理
let tcb = capset.alloc_tcb(Some(1))?;
// 创建一个 Endpoint,目前没有用到
capset
.alloc_endpoint(Some(DEFAULT_SERVE_EP.bits() as usize))
.unwrap();
// 将父任务的 Endpoint 能力 mint 到子任务 cspace 中,子任务通过该能力发送 IPC 请求给父任务
capset
.root_cnode()
.absolute_cptr_from_bits_with_depth(DEFAULT_PARENT_EP.bits(), 64)
.mint(
&LeafSlot::from(DEFAULT_SERVE_EP).abs_cptr(),
CapRights::all(),
tid as _,
)
.unwrap();
// 分配 IPC buffer 区域,并进行 map
let (virt, ipc_cap) = alloc_ipc_buffer_by_capset(&mut capset)?;
// 这段是为了 SMP 任务迁移准备的,将子任务的 cnode 能力 copy 到其他核心的管理任务 cspace 中
// 这样迁移到其他核心时,该核心上的管理任务就能访问该任务的能力了
for i in 0..axconfig::plat::CPU_NUM {
if i == cpu_id {
continue;
}
let _ = LeafSlot::new(0x90 + i)
.cap()
.absolute_cptr_from_bits_with_depth(cnode_index as _, 52)
.delete();
let _ = LeafSlot::new(0x90 + i)
.cap()
.absolute_cptr_from_bits_with_depth(cnode_index as _, 52)
.copy(&capset.root_cnode_path(), CapRights::all());
}
// 配置 TCB,使用管理任务的 VSPACE,这样就共享了地址空间
tcb.tcb_configure(
DEFAULT_PARENT_EP.cptr(),
capset.root_cnode(),
CNodeCapData::skip_high_bits(CNODE_RADIX_BITS),
init_thread::slot::VSPACE.cap(),
virt.as_usize() as _,
ipc_cap,
)
.unwrap();
// 设置 tls 区域
tcb.tcb_set_tls_base(_tls as _)?;
// 设置任务优先级,子任务优先级需要低于管理任务
tcb.tcb_set_sched_params(sel4::init_thread::slot::TCB.cap(), 0, priority as _)?;
// 设置任务初始上下文,其中 x28 被用于存放 per-cpu area 基址,因为在用户态实在找不到寄存器放了
let mut regs = tcb.tcb_read_all_registers(true)?;
*regs.pc_mut() = entry as _;
*regs.sp_mut() = sp as _;
*regs.gpr_mut(8) = virt.as_usize() as _;
*regs.gpr_mut(0) = cpu_id as _;
*regs.gpr_mut(28) = percpu::percpu_area_base(cpu_id) as _;
tcb.tcb_write_all_registers(false, &mut regs)?;
// 设置任务亲和性
tcb.tcb_set_affinity(cpu_id as _)?;
3.4 任务调度 #
通常在 kernel 中,任务调度通过上下文切换实现。但是目前设计中,每个 ArceOS 任务都是一个 seL4 任务,所以只能通过 seL4 kernel 切换任务。
普通任务由于无法访问下一个任务的 tcb,所以需要请求管理任务进行任务切换。切换的实现如下,基本就是 suspend 上一个,resume 下一个任务。
pub fn switch_sel4_task(prev_tid: usize, next_tid: usize) {
if let Some(t) = TASK_MAP.lock().get(&prev_tid) {
// t.lock().suspend().unwrap();
// 这里是比较重要的设计,将 pc 往下移到下一个指令,类似 kernel 中处理 syscall 的操作
// 如果不这么做,子任务始终会不停的发送 IPC 请求,就像一直发送 ecall 一样
t.lock().add_pc_offset(4).unwrap();
}
if let Some(t) = TASK_MAP.lock().get(&next_tid) {
t.lock().start().unwrap();
}
}
3.5 任务迁移 #
多核系统中,涉及到任务在不同核心上迁移,借助 seL4 设置亲和性 syscall 实现。
任务迁移分为两步,首先当 ArceOS 执行核心迁移操作时,在 NormalTask 中增加一个 flag,告知该任务需要迁移。
等到下一次启动该任务时,会对该任务执行真正的迁移操作,如下实现
pub fn migrate(&mut self, target: usize) -> sel4::Result<()> {
if self.affinity == target {
return Ok(());
}
// 设置亲和性,迁移标志位
self.affinity = target;
self.migrate = true;
Ok(())
}
pub fn start(&mut self) -> sel4::Result<()> {
if self.migrate {
// 将父任务的 Endpoint 改成当前核心的管理任务
// 先删除 DEFAULT_PARENT_EP
sel4::init_thread::slot::CNODE
.cap()
.absolute_cptr_from_bits_with_depth(
(self.cnode_index << 12) as u64 + DEFAULT_PARENT_EP.bits(),
64,
)
.delete()?;
// 将当前核心管理任务 DEFAULT_PARENT_EP mint 到当前子任务
sel4::init_thread::slot::CNODE
.cap()
.absolute_cptr_from_bits_with_depth(
(self.cnode_index << 12) as u64 + DEFAULT_PARENT_EP.bits(),
64,
)
.mint(
&LeafSlot::from(DEFAULT_SERVE_EP).abs_cptr(),
CapRights::all(),
self.tid as _,
)?;
let tcb = LeafSlot::new((self.cnode_index << CNODE_RADIX_BITS) + 1).cap();
let mut regs = tcb.tcb_read_all_registers(true).unwrap();
// 修改 percpu 到当前核心
*regs.gpr_mut(28) = percpu::percpu_area_base(self.affinity) as _;
// 修改任务 cpu 亲和性
tcb.tcb_write_all_registers(false, &mut regs).unwrap();
tcb.tcb_set_affinity(self.affinity as _).unwrap();
self.migrate = false;
}
3.6 任务退出 #
退出时需要仔细的处理资源回收,如下
pub fn exit(&self) {
// 回收所有能力到 untyped 能力
self.capset.drop().unwrap();
// 回收 ipc buffer
dealloc_ipc_buffer(self.ipc_buffer_addr);
// 删除子任务 root cnode
for i in 0..axconfig::plat::CPU_NUM {
let _ = LeafSlot::new(0x90 + i)
.cap()
.absolute_cptr_from_bits_with_depth(self.cnode_index as _, 52)
.revoke();
let _ = LeafSlot::new(0x90 + i)
.cap()
.absolute_cptr_from_bits_with_depth(self.cnode_index as _, 52)
.delete();
}
// 回收空白的 untyped 能力
recycle_untyped(self.untyped, self.created_cpu);
// 回收分配的 cnode_index
TASK_CSPACE_ALLOCATOR.lock().recycle(self.cnode_index);
}
3.7 ArceOS 适配 #
ArceOS 中的适配,主要是在创建,切换等过程中需要 seL4 任务的支持。比如创建任务的时候,需要同时创建一个 seL4 任务对象,供切换时使用。
如上所说,所有操作都是需要发送 IPC 请求给管理任务,为了简化 IPC,使用 task_id 代表 NormalTask 实例。同时管理任务中会使用 map 建立 task_id 和 NormalTask 的映射关系,这样管理任务就可以通过 task_id 找到对应的 NormalTask 实例进行操作。
pub fn start_sel4_task(tid: usize) {
// 从 map 中根据 tid 找到对应实例
if let Some(t) = TASK_MAP.lock().get(&tid) {
t.lock().start().unwrap();
}
}
4. 讨论 #
当前每个 arceos 任务对应一个 seL4 任务,这样设计的好处是简单直接,缺点是每个任务都有独立的内核栈和 TCB,资源开销较大。如果需要优化,可以考虑将多个 arceos 任务映射到同一个 seL4 任务中,通过用户态线程库实现任务切换和调度,从而减少内核资源的消耗。
任务调度完全依赖于 seL4 的 suspend 和 resume 操作,这样设计的好处是利用了 seL4 已经验证过的调度机制,缺点是多次 syscall 开销较大,也许有可探索的更加方案。比如事先将优先级排好,如果没有特别情况,直接让出当前任务,也许可以自动切换到下一个准备好的任务。